Helicopter#
- Tags
Rotational, Tracking, Pendulum, Stable, MIMO
- Available
3
- Inputs
1 or 2
- Outputs
2 or 4
Introduction#
The helicopter setup consists of a beam attached to a fixed pole. The beam can freely rotate in the horizontal and vertical planes. At both ends of the beam, DC motors with propellers are attached. One motor is used to control the vertical angle (elevation), the other one the horizontal angle (azimuth). There is a small pin close to the pivot point which can be used to constrain the azimuth.
The objective is to control the motors such that attitude of the beam follows a specified reference. In a simpler version of this experiment, the beam can be locked in a fixed position in the horizontal plane and only the vertical angle is controlled by using one propeller.
|
|---|
Helicopter setup. |

The schematic diagram below shows the construction of the system including the relevant variables. Positive directions of variables are indicated by arrows.
For each angle, this system has one control input \(u\), which is the voltage applied to the respective motor. In the schematic, only symbols for the elevation motor are shown.
This input is commanded from the computer and is scaled between -1 (corresponding to the maximal voltage making propeller and the beam rotate in the negative sense) and +1 (corresponding to the maximal voltage making the propeller and the beam rotate in the positive sense).
|
|---|
Schematic diagram of the helicopter setup. |
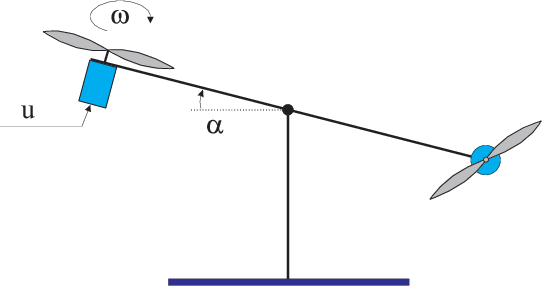
There are two measured outputs: \(\omega\) – the angular velocity of the propeller, and \(\alpha\) – the angle of the beam. The measurement of \(\omega\) is scaled between -1
(corresponding to the maximal negative velocity) and +1 (corresponding to the maximal positive velocity). You will need to calibrate those measurements to correspond to their physical units, e.g., radians. The sensor offsets and gains are defined by the script hwinit.m.
Control objectives#
Different control objectives can be defined for this setup, both when keeping the setup fixed in one plane or with both azimuth and elevation free. Reference tracking should be achieved, while improving the damping compared to an open-loop setup..