Magnetic Levitation#
- Tags
Tracking, Unstable
- Available
1
- Inputs
1
- Outputs
1
Introduction#
The Magnetic Levitation setup consists of a vertical coil with an iron core and a steel ball placed below the coil. The objective is to levitate the ball and control its position by manipulating the current through the coil. The figure below shows the system, including a schematic with the relevant variables.
|
|---|
Magnetic Levitation setup. |

|
|---|
Magnetic Levitation setup. |
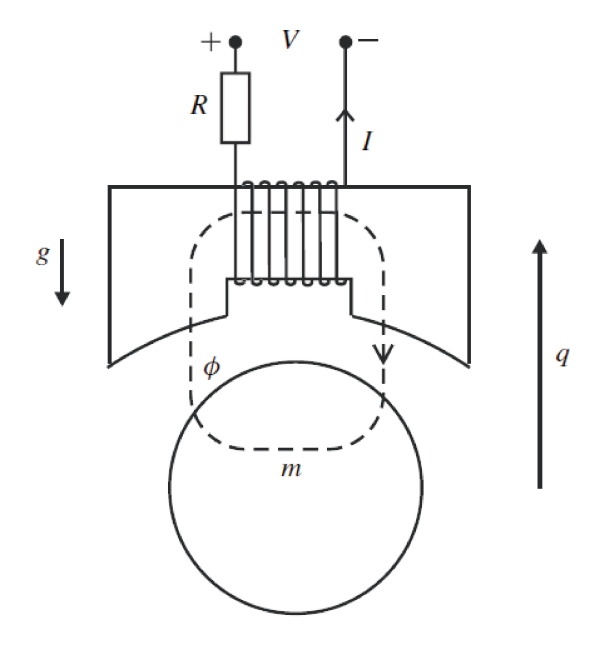
This system has one control input \(u\), which is the current applied to the coil. This input is commanded from the computer and is scaled between 0 and 1. There is one measured output: \(q\) – the position of the ball is also scaled between 0 and 1. You will need to calibrate the measurement if you want to convert them to physical units, e.g., meters.
Control Objective#
Design a controller that makes the ball position follow a specified reference trajectory. The controlled system should have zero steady-state error and adequate disturbance rejection properties, i.e., it should be able to recover from a small tick against the ball.
Simulink Template#
A Simulink template maglevtemplate.slx contains the necessary real-time interface blocks and some scopes. Make your own copy of this file (and other files in the same directory) and use it as a starting point for your experiments. Before starting the first simulation, define the sampling period \(h\) as a variable in the Matlab Workspace.