Rotational Pendulum#
- Tags
Low damping, Rotational, Tracking, Unstable
- Available
3
- Inputs
1
- Outputs
2
Introduction#
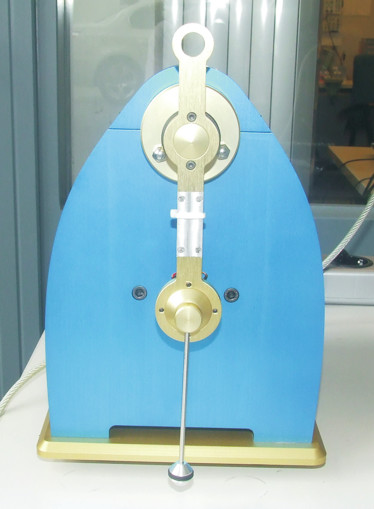
The rotational pendulum is in fact a two-link rigid manipulator operating in a vertical plane. The first (lower) joint, is actuated by a torque introduced by a DC motor. The second (upper) joint is free to rotate. Both links (arms) can rotate the full 360 degrees. The objective is to control the motor such that the joints are stabilized at some desired angles. The easiest task is to control the links around the stable equilibrium (both links down). More difficult tasks are when the second link is in its unstable equilibrium (pointing upward).
|
|---|
Rotational Pendulum setup. |
|
|---|
Rotational Pendulum setup. |
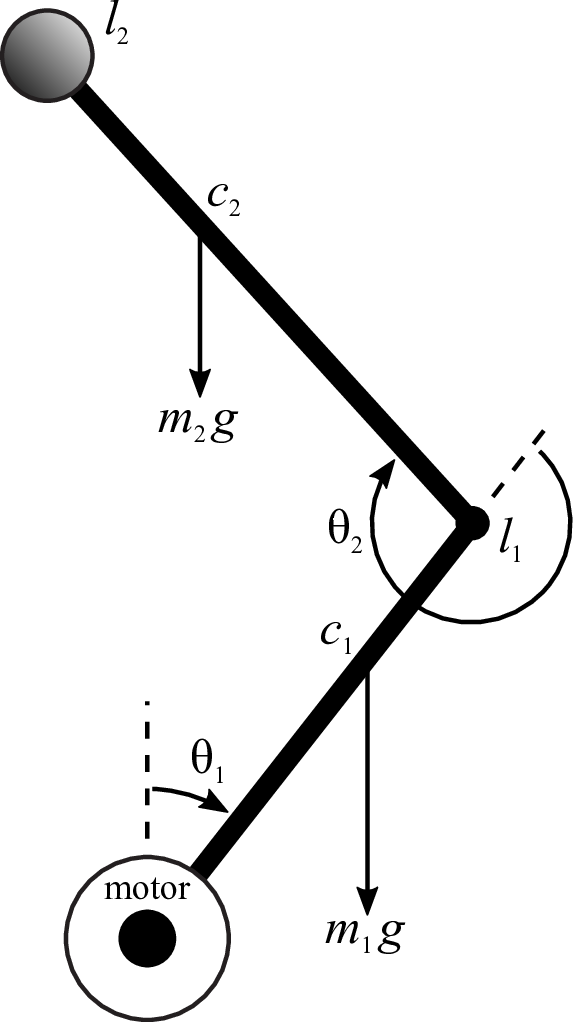
This system has one control input \(u\), which is the voltage applied to the motor which in turn delivers a torque that accelerates the lower link. This input is commanded from the computer and is scaled between -1 and +1 (corresponding to the maximal voltage moving the lower link clockwise and counter-clockwise). There are two
measured outputs: \(\theta_1\) – the angle of the lower joint, and \(\theta_2\) – the angle between the lower and upper joint. You will need to calibrate those measurements to correspond to their physical units, e.g., radians. The calibration offsets and gains are entered in the script hwinit.m.
Control Objective#
Design a controller that makes the angle of first link \(\theta_1\) follow a specified reference trajectory while stabilizing the second link in the upright position. It is easier to start with the stable equilibrium (both links down) and just make a controller to damp the swing (like an overhead crane). The controlled system should have zero steady state error in \(\theta_1\) (small oscillations around the reference are permitted, as these are caused by Coulomb friction and stiction and are difficult to avoid when using linear control only) and adequate disturbance rejection properties, i.e., it should be able to recover from a small tick against the link.
Simulink Template#
A Simulink template rpendtemplate.slx contains the necessary real-time interface blocks and some scopes. Make your own copy of this file and use it as a starting point
for your experiments. Before starting the first simulation, define the sampling period \(h\) as a variable in the workspace of Matlab.