Inverted Pendulum#
- Tags
Rotational, Tracking, Unstable
- Available
1
- Inputs
1
- Outputs
2
Introduction#
The inverted pendulum setup consists of a cart driven by a DC motor. The motor can steer the cart left and right on a track approximately one meter long. On the cart, a pendulum is mounted such that it can freely rotate around an axis that is perpendicular to the direction of motion of the cart. The objective is to control the motion of the cart such that the pendulum is balanced in its upright position. The schematic diagram the image below shows the construction of the system including all the relevant parameters and variables. Positive directions of variables are indicated by arrows.
|
|---|
Inverted pendulum setup. |
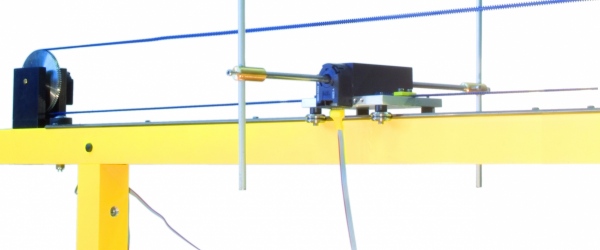
This system has one control input \(u\), which is the voltage driving the cart motor. This input is commanded from the computer and is scaled between -1 (corresponds to the maximal input moving the cart to the left) and +1 (corresponds to the maximal input moving the cart to the right). There are two measured outputs: \(d\) – the displacement of the cart from the track center, and \(\alpha\) – the angle of the pendulum. You will need to calibrate those measurements to correspond to their physical units, e.g., meters and radians, respectively.
Control Objective#
Design a controller that makes the cart follow a specified reference trajectory for \(d\) while balancing the pendulum. The controlled system should have zero steady state error in \(d\) and adequate disturbance rejection properties, i.e., it should be able to recover from a small tick against the pendulum.
Simulink Template#
A Simulink template pendtemplate.slx contains the necessary real-time interface blocks and some scopes. Make your own copy of this file and use it as a starting point
for your experiments. Before starting the first simulation, define the sampling period \(h\) as a variable in the workspace of Matlab.
Start-up Procedure#
First move the cart by hand to the rightmost position (gearwheel above gap in track) and hold it there while switching the box on. Run calib.m to calibrate the sensors (needs to be done every time you switch on the system).