Linear Actuator, Flexible load#
- Tags
Tracking, Translational
- Available
1
- Inputs
1
- Outputs
2
Introduction#
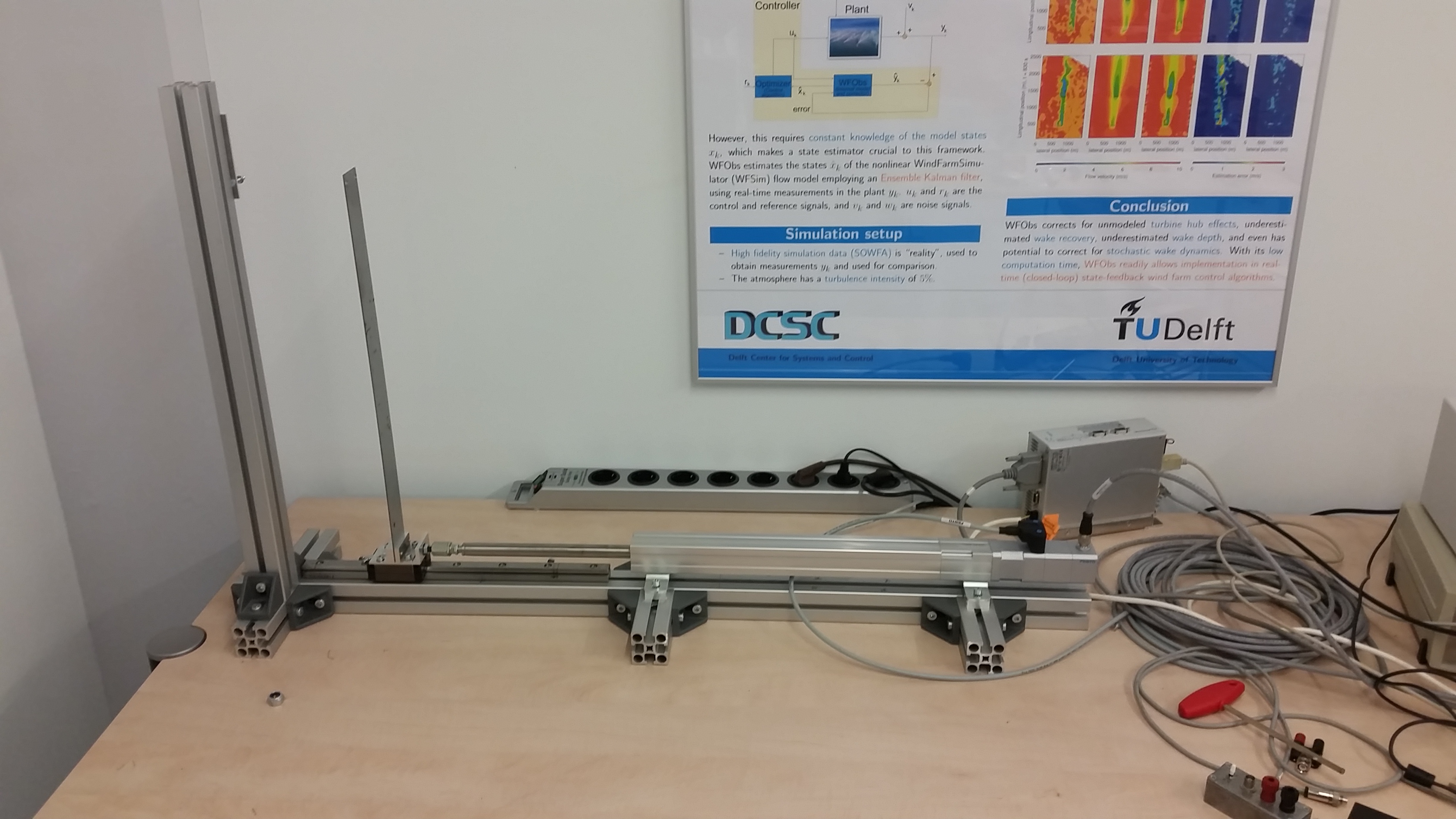
The Linear Actuator with flexible load is a FESTO actuator connected with a flexible beam. The spindle of the linear actuator is actuated by a torque introduced by a DC motor acting on the rear end of the actuator. The beam, flexible body, is rigidly connected to the actuator.
The control input u is the voltage applied on the motor that actuates the spindle. The scaled input signal ranges from -? to ? (corresponding to the maximal clockwise and counter-clockwise torques, respectively) and can be commanded from the PC. There are two output measurements available: i) \(x_\mathrm{cart}\), the position of the linear actuator and ii) \(x_\mathrm{laser}\), the position at the tip of the beam. You will need to calibrate those measurements to correspond to their physical units, e.g., meters. The parameters of the system are given in the table below. Note that these values are approximate and not necessarily correct for your specific setup. Hence, you need to design an identification experiment to accurately identify the system’s parameters.
|
|---|
Linear actuator setup. |
Control Objective#
Design a controller that follows a block-shaped trajectory and minimizes the oscillations of the beam. For simplicity, start with a SISO controller that has perfect tracking on \(x_\mathrm{cart}\). The eventual design should result into a zero steady-state error in \(x_\mathrm{cart}\) (small oscillations around the reference are permitted) and into acceptable vibrations of \(x_\mathrm{laser}\).
Simulink Template#
A Simulink template LinearActuator.slx contains the necessary real-time interface blocks and some scopes. Make your own copy of this file and use it as a starting point for your experiments. Before starting the first simulation, define the sampling period \(h\) as a variable in the workspace of Matlab.